




NCERT Solutions for Class 12 Maths Chapter 4 Determinants - Miscellaneous Exercise




Access Exercises of Class 12 Maths Chapter 4 –Determinants
Exercise 4.1 Solutions: 8 Questions (2 Long, 5 Short Answers, 1 MCQ)
Exercise 4.2 Solutions: 16 Questions(7 Long, 7 Short, 2 MCQs)
Exercise 4.3 Solutions: 5 Questions ( 4 Short Answers, 1 MCQ)
Exercise 4.4 Solutions: 5 Questions (4 Long, 1 MCQ)
Exercise 4.5 Solutions: 18 Questions (11 Long, 5 Short, 2 MCQs)
Exercise 4.6 Solutions: 16 Questions (13 Long, 3 Short)
Miscellaneous Exercise Solutions: 19 Questions (15 Long, 1 Short, 3 MCQs)
Miscellaneous Exercise
1. Prove that the determinant
$$\begin{bmatrix}\textbf{x} &\textbf{sin}\space\theta &\textbf{cos}\space\theta\\\textbf{\normalsize-sin}\space\theta &\textbf{\normalsize-x} &\textbf{1}\\\textbf{cos}\space\theta &\textbf{1} &\textbf{x}\end{bmatrix}$$
is independent of θ.
$$\textbf{Sol.\space}\text{Let A = }\begin{vmatrix}\textbf{x} &\textbf{sin}\space\theta &\textbf{cos}\space\theta\\-\textbf{sin}\space\theta &\textbf{\normalsize-x} &1\\\textbf{cos}\space\theta &\textbf{1} &\textbf{x}\end{vmatrix}$$
Expanding to corresponding first row, we get
$$\text{A} = x\begin{vmatrix}-x &1\\1 &x\end{vmatrix}-\text{sin}\space\theta\begin{vmatrix}-\text{sin}\space\theta &1\\\text{cos}\space\theta &x\end{vmatrix}\\+ \text{cos}\space\theta\begin{vmatrix}-\text{sin}\space\theta &\normalsize-x\\\text{cos}\space\theta &1\end{vmatrix}$$
= x (– x2 – 1) – sin θ(– x sin θ – cos θ) + cos θ(– sin θ + x cos θ)
= – x3 – x + x sin2θ + sin θ cos θ – sin θ cos θ + x cos2 θ
= – x3 – x + x(sin2 θ + cos2 θ)
= – x3 – x + x (∵ sin2 θ + cos2 θ = 1)
= – x3.
Hence, A is independent of θ.
2. Without expanding the determinant, prove that
$$\begin{vmatrix}\textbf{a} &\textbf{a}^{2} &\textbf{bc}\\\textbf{b} &\textbf{b}^{2} &\textbf{ca}\\\textbf{c} &\textbf{c}^{2} &\textbf{ab}\end{vmatrix}\textbf{=}\begin{vmatrix}\textbf{1} &\textbf{a}^{\textbf{2}} &\textbf{a}^{\textbf{3}}\\\textbf{1} &\textbf{b}^{2} &\textbf{b}^{3}\\1 &\textbf{c}^{2} &\textbf{c}^{3}\end{vmatrix}\\\textbf{Sol.\space}\text{LHS = }\begin{vmatrix}a &a^{2} &bc\\b &b^{2} &ca\\c &c^{2} &ab\end{vmatrix}$$
Operating R1 → aR1, R2 → bR2 and R3 → cR3 we obtain
$$=\frac{1}{abc}\begin{vmatrix}a^{2} &a^{3} &abc\\b^{2} &b^{3} &abc\\c^{2} &c^{3} &abc\end{vmatrix}\\=\frac{1}{abc}×abc\begin{vmatrix}a^{2} &a^{3} &1\\b^{2} &b^{3} &1\\c^{2} &c^{3} &1\end{vmatrix}$$
[Taking out factor abc from C3]
$$=(\normalsize-1)^{2}\begin{vmatrix}1 &a^{2} &a^{3}\\1 &b^{2} &b^{3}\\1 &c^{2} &c^{3}\end{vmatrix}$$
(using C1 ↔ C3 and C2 ↔ C3)
$$=\begin{vmatrix}1 &a^{2} &a^{3}\\1 &b^{2} &b^{3}\\ 1& c^{2} & c^{3}\end{vmatrix}=\text{RHS}$$
Note : When we multiply any row or column of a determinant by any constant k then it is necessary that determinant divides by k.
$$\textbf{3.\space}\textbf{Evaluate}\\\space\begin{vmatrix}\textbf{cos}\alpha\textbf{cos}\beta &\textbf{cos}\alpha\textbf{sin}\beta&-\textbf{sin\space}\alpha\\\textbf{-sin}\space\beta &\textbf{cos}\space\beta &\textbf{0}\\\textbf{sin}\space\alpha\textbf{cos}\space\beta &\textbf{sin}\space\alpha\textbf{sin}\space\beta &\textbf{cos}\space\alpha\end{vmatrix}$$
Sol. Given, determinant
$$=\begin{vmatrix}\text{cos}\alpha\text{cos}\beta &\text{cos}\alpha\text{sin}\beta &-\text{sin}\space\alpha\\-\text{sin}\space\beta &\text{cos}\space\beta &0\\\text{sin}\alpha\text{cos}\beta &\text{sin}\space\alpha\text{sin}\beta &\text{cos}\space\alpha\end{vmatrix}$$
Expanding corresponding to R1, we get
= cos α cos β (cos α cos β – 0) – cos α sin β(– cos α sin β – 0) – sin α(– sin2 β sin α – cos2 β sin α)
= cos2 α cos2 β + cos2 α sin2 β + sin2 α (sin2 β + cos2 β)
= cos2 α (cos2 β + sin2 β) + sin2 α (sin2 β + cos2 β)
= cos2 α (1) sin2 α (1) = cos2 α + sin2 α = 1.
[∵ sin2 θ + cos2 θ = 1]
4. If a, b and c are real numbers and
$$\Delta =\begin{vmatrix}\textbf{b+c} &\textbf{c+a} &\textbf{a+b}\\\textbf{c+a} &\textbf{a+b} &\textbf{b+c}\\\textbf{a+b} &\textbf{b+c} &\textbf{c+a}\end{vmatrix} \textbf{= 0.}$$
Show that either
a + b + c = 0 or a = b = c.
$$\textbf{Sol.\space}\text{Given,\space}\Delta =\begin{vmatrix}b+c &c+a &a+b\\\text{c+a} &a+b &b+c\\a+b &b+c &c+a\end{vmatrix}\\=\begin{vmatrix}2(a+b+c) &c+a &a+b\\2(a+b+c) &a+b &b+c\\2(a+b+c) &b+c &c+a\end{vmatrix}$$
(using C1 → C1 + C2 + C3)
$$= 2(a+b+c)\begin{vmatrix}1 &c+a &a+b\\1 &a+b &b+c\\1 &b+c &c+a\end{vmatrix}$$
(Taking out factor 2(a + b) + c) from C1)
$$= 2(a+b+c)\begin{vmatrix}1 &c+a &a+b\\0 &b-c &c-a\\0 &b-a &c-b\end{vmatrix}$$
(using R2 → R2 – R1, R2 → R3 – R1)
By expanding along C1, we get
= 2(a + b + c)[(b – c)(c – b) – (b – a)(c – a)]
= 2(a + b + c) [bc – c2 – b2 + bc – bc + ac + ab – a2]
= 2(a + b + c)[ab + bc + ca – a2 – b2 – c2]
It is given that Δ = 0,
∴ (a + b + c) × 2[ab + bc + ca – a2 – b2 – c2] = 0
⇒ Either (a + b + c) = 0
or 2[ab + bc + ca – a2 – b2 – c2] = 0
If 2[ab + bc + ca – a2 – b2 – c2] = 0
⇒ –(2a2 + 2b2 + 2c2 – 2ab – 2bc – 2ca) = 0
[Taking negative sign common]
⇒ 2a2 + 2b2 + 2c2 – 2ab – 2bc – 2ca = 0
⇒ (a2 + b2 – 2ab) + (b2 + c2 – 2bc) + (c2 + a2 – 2ca) = 0
⇒ (a – b)2 + (b – c)2 + (c – a2)= 0
[∵ (x – y)2 = x2 + y2 – 2xy]
⇒ (a – b)2 = (b – c)2 = (c – a)2 = 0
[∵ (a – b)2, (b – c)2, (c – a)2 are positive]
⇒ (a – b)2 = (b – c)2 = (c – a)2 = 0
⇒ a = b = c
Hence, if Δ = 0, then either a + b + c = 0 or a = b = c.
5. Solve the equation, if
$$\begin{vmatrix}\textbf{x+a} &\textbf{x} &\textbf{x}\\\textbf{x} &\textbf{x+a} &\textbf{x}\\\textbf{x} &\textbf{x} &\textbf{x+a}\end{vmatrix}\\\textbf{= 0, a}\neq\textbf{0,}$$
$$\textbf{Sol.\space}\text{Given,\space}\begin{vmatrix}x+a &x &x\\x &x+a &x\\x &x &x+a\end{vmatrix}\\= 0\\\Rarr\space\begin{vmatrix}3x+a &3x+a &3x+a\\ x &x+a &x\\x &x &x+a\end{vmatrix}=0$$
(using R1 → R1 + R2 + R3)
$$\Rarr\space(3x+a)\begin{vmatrix}1 &1 &1\\x &x+a &x\\x &x &x+a\end{vmatrix}= 0$$
(Taking out (3x + a) from R1)
$$\Rarr\space(3x+a)\begin{vmatrix}1 &0 &0\\x &a &0\\x &0 &a\end{vmatrix}=0,$$
(using C2 → C2 – C1 and C3 → C3 – C1)
Expanding corresponding to R1 (first row), we get
(3x + a)[1(a × a – 0)] = 0
⇒ a2(3x + a) = 0
But a ≠ 0 (given). Therefore, 3x + a = 0
$$\Rarr\space x =-\frac{a}{3}.$$
6. Prove that
$$\begin{vmatrix}\textbf{a}^{\textbf{2}} &\textbf{bc} &\textbf{ac+c}^{\textbf{2}}\\\textbf{a}^{2}\textbf{+ ab} &\textbf{b}^{\textbf{2}} &\textbf{ac}\\\textbf{ab} &\textbf{b}^{\textbf{2}}\textbf{+bc} &\textbf{c}^{\textbf{2}}\end{vmatrix}$$= 4a2b2c2.
$$\textbf{Sol.\space}\text{LHS =}\space\begin{vmatrix}a^{2} &bc &ac+c^{2}\\a^{2}+ab &b^{2} &ac\\ab &b^{2}+bc &c^{2}\end{vmatrix}\\= abc\begin{vmatrix}a &c &a+c\\a+b &b &a\\b &b+c &c\end{vmatrix}$$
(Take out a from C1, b fom C2 and c from C3)
$$=abc\begin{vmatrix}0 &c &a+c\\2b &b &a\\2b &b+c &c\end{vmatrix}$$
(using C1 → C1 + C2 – C3)
$$=\space abc\begin{vmatrix}0 &c &a+c\\0 &\normalsize-c &a-c\\2b &b+c &c\end{vmatrix}$$
$$\lbrack\text{using}\space\text{R}_{2}\xrightarrow{}\text{R}_{2}-\text{R}_{3}\rbrack$$
Expanding along C1, we get
= (abc) [(2b){c(a – c) + c(a + c)}]
= 2(ab2c)(2ac) = 4a2b2c2 = RHS
Hence proved.
$$\textbf{7.\space If A}^{\normalsize-1} =\begin{bmatrix}\textbf{3} &\textbf{\normalsize-1} &\textbf{\normalsize1}\\\textbf{\normalsize-15} &\textbf{6} &\textbf{\normalsize-5}\\\textbf{5} &\textbf{\normalsize-2} &\textbf{2}\end{bmatrix}\\\textbf{and B = }\begin{bmatrix}\textbf{1} &\textbf{2} &\textbf{-2}\\\textbf{-1} &\textbf{3} &\textbf{0}\\\textbf{0} &\textbf{-2} &\textbf{1}\end{bmatrix}\textbf{,}\\\textbf{find\space (AB)}^{\normalsize-1}\textbf{.}$$
Sol. We know that (AB)–1 = B–1A–1 and A–1 is known, therefore, we proceed to find B–1.
$$\text{Here,\space |B| =}\begin{vmatrix}1 &2 &\normalsize-2\\\normalsize-1 &3 &0\\0 &\normalsize-2 &1\end{vmatrix}$$
= 1(3 – 0) – 2(– 1 – 0) – 2(2 – 0)
= 3 + 2 – 4 = 1 ≠ 0
∴ B–1 exists. Cofactors of B are
B11 = (3 – 0) = 3, B12 = – (– 1 – 0) = 1, B13 = (2 – 0) = 2,
B21 = – (2 – 4) = 2,B22 = 1 – 0 = 1, B23 = – (– 2 – 0) = 2,
B31 = (0 + 6) = 6, B32 = – (0 – 2)= 2, B33 = 3 + 2 = 5,
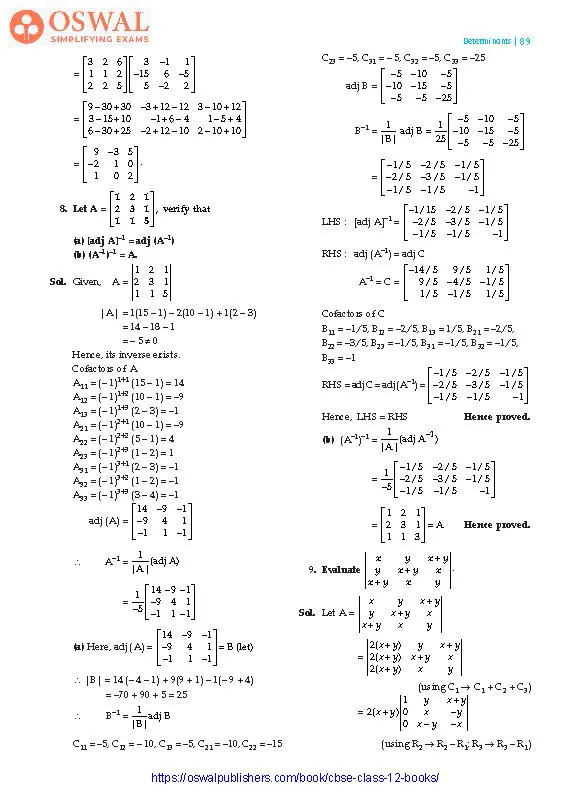
$$\therefore\space\text{adj B} =\begin{bmatrix}3 &1 &2\\2 &1 &2\\6 &2 &5\end{bmatrix}^{\text{T}}=\begin{bmatrix}3 &2 &6\\1 &1 &2\\2 &2 &5\end{bmatrix}\\\therefore\space\text{B}^{\normalsize-1}=\frac{1}{|\text{B}|}\space\text{adj(B)}\\=\frac{1}{1}\begin{bmatrix}3 &2 &6\\1 &1 &2\\2 &2 &5\end{bmatrix}=\begin{bmatrix}3 &2 &6\\1 &1 &2\\2 &2 &5\end{bmatrix}$$
Now, (AB)–1 = B–1A–1
$$=\begin{bmatrix}3 &2 &6\\1 &1 &2\\2 &2 &5\end{bmatrix}\begin{bmatrix}3 &\normalsize-1 &1\\\normalsize-15 &6 &\normalsize-5\\5 &\normalsize-2 &2\end{bmatrix}\\=\\\begin{bmatrix}9-30+30 &-3+12-12 &3-10+12\\3-15+10 &-1+6-4 &1-5+4\\6-30+25 &-2+12-10 &2-10+10\end{bmatrix}\\=\begin{bmatrix}9 &\normalsize-3 &5\\\normalsize-2 &1 &0\\1 &0 &2\end{bmatrix}.$$
$$\textbf{8.\space Let A = }\begin{bmatrix}\textbf{1} &\textbf{2} &\textbf{1}\\\textbf{2} &\textbf{3} &\textbf{1}\\\textbf{1} &\textbf{1} &\textbf{5}\end{bmatrix}\textbf{,}\space\textbf{verify that}$$
(a) [adj A]–1 = adj (A–1)
(b) (A–1)–1 = A.
$$\textbf{Sol.\space}\text{Given, A = }\begin{vmatrix}1 &2 &1\\2 &3 &1\\1 &1 &5\end{vmatrix}$$
|A| = 1(15 – 1) – 2(10 – 1) + 1(2 – 3)
= 14 – 18 – 1
= – 5 ≠ 0
Hence, its inverse exists.
Cofactors of A
A11 = (– 1)1+1 (15 – 1) = 14
A12 = (– 1)1+2 (10 – 1) = –9
A13 = (– 1)1+3 (2 – 3) = –1
A21 = (– 1)2+1 (10 – 1) = –9
A22 = (– 1)2+2 (5 – 1) = 4
A23 = (– 1)2+3 (1 – 2) = 1
A31 = (– 1)3+1 (2 – 3) = –1
A32 = (– 1)3+2 (1 – 2) = –1
A33 = (– 1)3+3 (3 – 4) = –1
$$\text{adj(A)} = \begin{bmatrix}14 &\normalsize-9 &\normalsize-1\\\normalsize-9 &4 &1\\\normalsize-1 &1 &\normalsize-1\end{bmatrix}\\\therefore\space\text{A}^{\normalsize-1}=\frac{1}{|\text{A}|}\space\text{(adj A)}\\=\frac{1}{\normalsize-5}\begin{bmatrix}14 &\normalsize-9 &\normalsize-1\\\normalsize-9 &4 &1\\\normalsize-1 &1 &\normalsize-1\end{bmatrix}\\\text{(a) Here, adj (A) =}\\\begin{bmatrix}14 &\normalsize-9 &\normalsize-1\\\normalsize-9 &4 &1\\\normalsize-1 &1 &\normalsize-1\end{bmatrix} =\text{B(let)}$$
∴ |B| = 14 (– 4 – 1) + 9(9 + 1) – 1(– 9 + 4)
= –70 + 90 + 5 = 25
$$\therefore\space\text{B}^{\normalsize-1}=\frac{1}{|\text{B}|}\space\text{adj B}$$
C11 = –5, C12 = – 10, C13 = –5, C21 = –10, C22 = –15
C23 = –5, C31 = – 5, C32 = –5, C33 = –25
$$\text{adj B = }\begin{bmatrix}\normalsize-5 &\normalsize-10 &\normalsize-5\\\normalsize-10 &\normalsize-15 &\normalsize-5\\ \normalsize-5 &\normalsize-5 &\normalsize-25\end{bmatrix}\\\text{B}^{\normalsize-1}=\frac{1}{|\text{B}|}\space\text{adj B}\\=\frac{1}{25}\begin{bmatrix}\normalsize-5 &\normalsize-10 &\normalsize-5\\\normalsize-10 &\normalsize-15 &\normalsize-5\\\normalsize-5 &\normalsize-5 &\normalsize-25\end{bmatrix}\\=\begin{bmatrix}\frac{\normalsize-1}{5} &\frac{\normalsize-2}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-2}{5} &\frac{\normalsize-3}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-1}{5} &\frac{\normalsize-1}{5} &\normalsize-1\end{bmatrix}$$
$$\text{adj B = }\begin{bmatrix}\normalsize-5 &\normalsize-10 &\normalsize-5\\\normalsize-10 &\normalsize-15 &\normalsize-5\\ \normalsize-5 &\normalsize-5 &\normalsize-25\end{bmatrix}\\\text{B}^{\normalsize-1}=\frac{1}{|\text{B}|}\space\text{adj B}\\=\frac{1}{25}\begin{bmatrix}\normalsize-5 &\normalsize-10 &\normalsize-5\\\normalsize-10 &\normalsize-15 &\normalsize-5\\\normalsize-5 &\normalsize-5 &\normalsize-25\end{bmatrix}\\=\begin{bmatrix}\frac{\normalsize-1}{5} &\frac{\normalsize-2}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-2}{5} &\frac{\normalsize-3}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-1}{5} &\frac{\normalsize-1}{5} &\normalsize-1\end{bmatrix}$$
$$\\\text{LHS : }[\text{adj A}]^{\normalsize-1}=\\\begin{bmatrix}\frac{\normalsize-1}{15} &\frac{\normalsize-2}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-2}{5} &\frac{\normalsize-3}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-1}{5} &\frac{\normalsize-1}{5} &\normalsize-1\end{bmatrix}$$
RHS : adj (A–1) = adj C
$$\text{A}^{\normalsize-1} =\text{C} =\begin{bmatrix}\frac{\normalsize-14}{5} &\frac{9}{5} &\frac{1}{5}\\\frac{9}{5} &\frac{\normalsize-4}{5} &\frac{\normalsize-1}{5}\\\frac{1}{5} &\frac{\normalsize-1}{5} &\frac{1}{5}\end{bmatrix}$$
Cofactors of C
B11 = –1/5, B12 = –2/5, B13 = 1/5,
B21 = –2/5, B22 = –3/5, B23 = –1/5,
B31 = –1/5, B32 = –1/5, B33 = –1
RHS = adj C = adj (A–1) =
$$\begin{bmatrix}\frac{\normalsize-1}{5} &\frac{\normalsize -2}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-2}{5} &\frac{\normalsize-3}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-1}{5} &\frac{\normalsize-1}{5} &\normalsize-1\end{bmatrix}$$
Hence, LHS = RHS Hence proved.
$$\text{(b)\space (A}^{\normalsize-1})^{\normalsize-1}=\frac{1}{|\text{A}|}\space\text{(adj A}^{\normalsize-1})\\=\frac{1}{\normalsize-5}\begin{bmatrix}\frac{\normalsize-1}{5} &\frac{\normalsize-2}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-2}{5} &\frac{\normalsize-3}{5} &\frac{\normalsize-1}{5}\\\frac{\normalsize-1}{5} &\frac{\normalsize-1}{5} &\normalsize-1\end{bmatrix}\\=\begin{bmatrix}1 &2 &1\\ 2 &3 &1\\1 &1 &3\end{bmatrix}=\text{A}\\\textbf{Hence proved.}$$
$$\textbf{9. Evaluate}\space\begin{vmatrix}\textbf{x} &\textbf{y} &\textbf{x+y}\\\textbf{y} &\textbf{x+y} &\textbf{x}\\\textbf{x+y} &\textbf{x} &\textbf{y}\end{vmatrix}\textbf{.}\\\textbf{Sol.\space}\text{Let A =}\begin{vmatrix}x &y &x+y\\y &x+y &x\\x+y &x &y\end{vmatrix}\\=\begin{vmatrix}2(x+y) &y &x+y\\2(x+y) &x+y &x\\2(x+y) &x &y\end{vmatrix}$$
(using C1 → C1 + C2 + C3)
$$=2(x+y)\begin{vmatrix}1 &y &x+y\\0 &x &\normalsize-y\\0 &x-y &-x\end{vmatrix}$$
(using R2 → R2 – R1; R3 → R3 – R1)
Expanding along R1, we get
= 2(x + y) × 1{– x2 + y(x – y)}
= 2(x + y)(– x2 + xy – y2)
= – 2(x + y)(x2 – xy + y2)
= – 2(x2 + y2)
10. Evalaute
$$\begin{vmatrix}\textbf{1} &\textbf{x} &\textbf{y}\\\textbf{1} &\textbf{x+y} &\textbf{y}\\\textbf{1} &\textbf{x} &\textbf{x+y}\end{vmatrix}\textbf{.}\\\textbf{Sol.\space}\text{Let A = }\begin{vmatrix}1 &x &y\\1 &x+y &y\\1 &x &x+y\end{vmatrix}\\=\begin{vmatrix}1 &x &y\\0 &y &0\\0 &0 &x\end{vmatrix}$$
(using R2 → R2 – R1 and R3 → R3 – R1)
Expanding along C1, we get A = 1(yx – 0) = xy
Using properties of determinants in Q. 11 to 15, prove that :
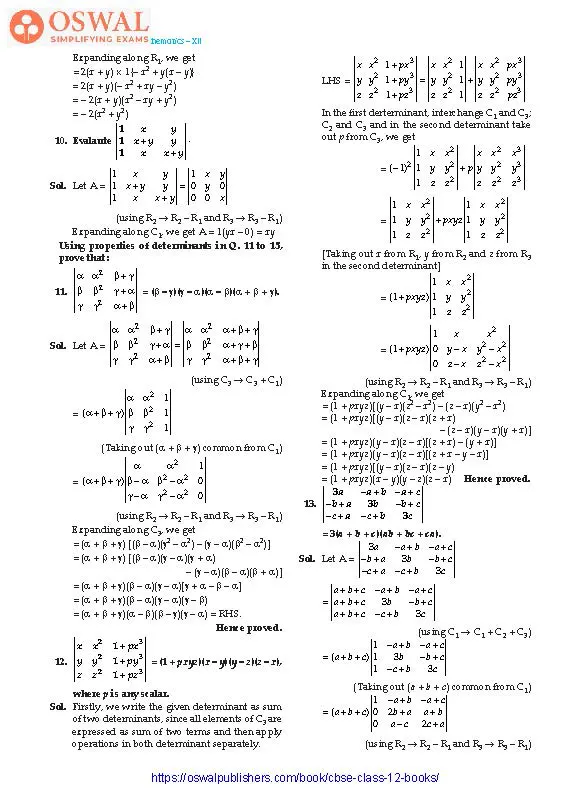
$$\textbf{11.\space}\begin{vmatrix}\alpha &\alpha^{2} &\beta+\gamma\\\beta &\beta^{2} &\gamma + \alpha\\\gamma &\gamma^{2} &\alpha+\beta\end{vmatrix}\\=(\beta - \gamma)(\gamma -\alpha)(\alpha-\beta)(\alpha+\beta+\gamma).$$
$$\textbf{Sol.\space}\text{Let A = }\begin{vmatrix}\alpha &\alpha^{2} &\beta+\gamma\\\beta &\beta^{2} &\gamma +\alpha\\\gamma &\gamma^{2} &\alpha +\beta\end{vmatrix}\\=\begin{vmatrix}\alpha &\alpha^{2} &\alpha+\beta+\gamma\\\beta&\beta^{2} &\alpha +\gamma+\beta\\\gamma &\gamma^{2} &\alpha+\beta+\gamma\end{vmatrix}$$
(using C3 → C3 + C1)
$$=(\alpha +\beta+\gamma)\begin{vmatrix}\alpha &\alpha^{2} &1\\\beta &\beta^{2} &1\\\gamma &\gamma^{2} &1\end{vmatrix}$$
(Taking out (α + β + γ) common from C1)
$$=\space(\alpha +\beta +\gamma)\begin{vmatrix}\alpha &\alpha^{2} &1\\\beta-\alpha &\beta^{2} -\alpha^{2} &0\\\gamma-\alpha &\gamma^{2}-\alpha^{2} &0\end{vmatrix}$$
(using R2 → R2 – R1 and R3 → R3 – R1)
Expanding along C3, we get
= (α + β + γ) [(β – α)(γ2 – α2) – (γ – α)(β2 – α2)]
= (α + β + γ) [(β – α)(γ – α)(γ + α) – (γ – α)(β – α)(β + α)]
= (α + β + γ)(β – α)(γ – α)[γ + α – β – α]
= (α + β + γ)(β – α)(γ – α)(γ – β)
= (α + β + γ)(α – β)(β – γ)(γ – α) = RHS.
Hence proved.
$$\textbf{12.}\space\begin{vmatrix}\textbf{x} &\textbf{x}^{2} &\textbf{1+px}^{\textbf{3}}\\\textbf{y} &\textbf{y}^{\textbf{2}} &\textbf{1+ py}^{3}\\\textbf{z} &\textbf{z}^{2} &\textbf{1 + pz}^{\textbf{3}}\end{vmatrix}$$
= (1 + pxyz)(x – y)(y – z)(z – x),
where p is any scalar.
Sol. Firstly, we write the given determinant as sum of two determinants, since all elements of C3 are expressed as sum of two terms and then apply operations in both determinant separately.
$$\text{LHS =}\begin{vmatrix}x &x^{2} &1+px^{3}\\y &y^{2} &1+py^{3}\\z &z^{2} &1+pz^{3}\end{vmatrix}\\=\begin{vmatrix}x &x^{2} &1\\y &y^{2} &1\\z &z^{2} &1\end{vmatrix} +\begin{vmatrix}x &x^{2} &px^{3}\\y &y^{2} &py^{3}\\z &z^{2} &pz^{3}\end{vmatrix}$$
In the first derterminant, interchange C1 and C3; C2 and C3 and in the second determinant take out p from C3, we get
$$(\normalsize-1)^{2}\begin{vmatrix}1 &x &x^{2}\\1 &y &y^{2}\\1 &z &z^{2}\end{vmatrix}+p\begin{vmatrix}x &x^{2} &x^{3}\\y &y^{2} &y^{3}\\z &z^{2} &z^{3}\end{vmatrix}\\=\begin{vmatrix}1 &x &x^{2}\\1 &y &y^{2}\\1 &z &z^{2}\end{vmatrix} + \text{pxyz}\begin{vmatrix}1 &x &x^{2}\\1 &y &y^{2}\\1 &z &z^{2}\end{vmatrix}$$
[Taking out x from R1, y from R2; and z from R3 in the second determinant]
$$= (1 + pxyz)\begin{vmatrix}1 &x &x^{2}\\ 1 &y &y^{2}\\1 &z &z^{2}\end{vmatrix}\\=\text{(1 + pxyz)}\begin{vmatrix}1 &x &x^{2}\\0 &y-x &y^{2}-x^{2}\\0 &z-x &z^{2}-x^{2}\end{vmatrix}$$
(using R2 → R2 – R1 and R3 → R3 – R1)
Expanding along C1, we get
= (1 + pxyz)[(y – x)(z2 – x2) – (z – x)(y2 – x2)
= (1 + pxyz)[(y – x)(z – x)(z + x) – (z – x)(y – x)(y + x)]
= (1 + pxyz)(y – x)(z – x)[(z + x) – (y + x)]
= (1 + pxyz)(y – x)(z – x)[(z + x – y – x)]
= (1 + pxyz)[(y – x)(z – x)(z – y)
= (1 + pxyz)(x – y)(y – z)(z – x)
Hence proved.
$$\textbf{13.\space}\begin{vmatrix}\textbf{3a} &\textbf{-a+b} &\textbf{-a+c}\\\textbf{-b+a} &\textbf{3b} &\textbf{-b+c}\\\textbf{-c+a} &\textbf{-c+b} &\textbf{3c}\end{vmatrix}$$
= 3(a + b + c)(ab + bc + ca).
$$\textbf{Sol.\space}\text{Let A} =\\\begin{vmatrix}3a &-a+b &-a+c\\-b+a &3b &-b+c\\-c+a &-c+b &3c\end{vmatrix}\\=\begin{vmatrix}a+b+c &-a+b &-a+c\\a+b+c &3b &-b+c\\a+b+c &-c+b &3c\end{vmatrix}$$
(using C1 → C1 + C2 + C3)
$$=(a+b+c)\begin{vmatrix}1 &-a+b &-a+c\\1 &3b &-b+c\\1 &-c+b &3c\end{vmatrix}$$
(Taking out (a + b + c) common from C1)
$$= (a +b+c)\begin{vmatrix}1 &-a+b &-a+c\\0 &2b+a &a+b\\0 &a-c &2c+a\end{vmatrix}$$
(using R2 → R2 – R1 and R3 → R3 – R1)
Expanding along C1, we get
= (a + b + c)[(2b + a)(2c + a) – (a – b)(a – c)]
= (a + b + c)[4bc + 2ab + 2ac + a2 – a2 + ac + ba – bc]
= (a + b + c)(3ab + 3bc + 3ac)
= 3(a + b + c)(ab + bc + ca)
= RHS Hence proved.
$$\textbf{14.\space}\begin{vmatrix}\textbf{1} &\textbf{1+p} &\textbf{1+p+q}\\\textbf{2} &\textbf{3+2p} &\textbf{4+3p+2q}\\\textbf{3} &\textbf{6+3}\textbf{p} &\textbf{10+6p+3q}\end{vmatrix}\\\textbf{= 1.}\\\textbf{Sol.}\space \text{LHS} = \begin{vmatrix}1 &1+p &1+p+q\\2 &3+2p &4+3p+2q\\3&6+3p &10+6p+3q\end{vmatrix}\\=\begin{vmatrix}1 &1+p &1+p+q\\0 &1 &2+p\\0 &3 &7+3p\end{vmatrix}$$
(using R2 → R2 – 2R1 and R3 → R3 – 3R1)
$$=\begin{vmatrix}1 &1+p &1+p+q\\0 &1 &2+p\\0 &0 &1\end{vmatrix}$$
(using R3 → R3 – 3R2)
Expanding along C1, we get
= 1(1 × 1 – 0) = 1 = RHS.
$$\textbf{15.\space}\begin{vmatrix}\textbf{sin}\space\alpha &\textbf{cos}\space\alpha &\textbf{cos}(\alpha+\delta)\\\textbf{sin}\space\beta &\textbf{cos}\space\beta &\textbf{cos}(\beta +\delta)\\\textbf{sin}\space\gamma &\textbf{cos}\space\gamma &\textbf{cos}\space(\gamma +\delta)\end{vmatrix}\\\textbf{= 0.}\\\textbf{Sol.\space}\text{Let A = }\\\begin{vmatrix}\text{sin}\space\alpha &\text{cos}\space\alpha &\text{cos}(\alpha +\delta)\\\text{sin}\space\beta &\text{cos}\space\beta &\text{cos}(\gamma +\delta)\\\text{sin}\space\gamma &\text{cos}\space\gamma &\text{cos}(\gamma +\delta)\end{vmatrix}\\=\begin{vmatrix}\text{sin}\space\alpha &\text{cos}\space\alpha &\text{cos}\space\alpha\text{cos}\space\delta -\text{sin}\alpha\text{sin}\space\delta\\\text{sin}\space\beta &\text{cos}\space\beta &\text{cos}\beta\text{cos}\delta - \text{sin}\beta\text{sin}\space\delta\\\text{sin}\space\gamma &\text{cos}\space\gamma &\text{cos}\gamma\text{cos}\delta -\text{sin}\gamma\text{sin}\delta\end{vmatrix}\\\lbrack\because\space\text{cos}(\text{A+B}) =\text{cos A cos B - sin A sinB}\rbrack$$
$$=\begin{vmatrix}\text{sin}\space\alpha &\text{cos}\space\alpha &\text{cos}\alpha\text{cos}\delta\\\text{sin}\space\beta &\text{cos}\space\beta &\text{cos}\beta\text{cos}\delta\\\text{sin}\gamma &\text{cos}\space\gamma &\text{cos}\gamma\text{cos}\delta\end{vmatrix} + \\\begin{vmatrix}\text{sin}\space\alpha &\text{cos}\space\alpha &-\text{sin}\space\alpha\text{sin}\delta\\\text{sin}\space\beta &\text{cos}\space\beta &-\text{sin}\beta\text{sin}\delta\\\text{sin}\space\gamma &\text{cos}\space\gamma &-\text{sin}\gamma\text{sin}\space\delta\end{vmatrix}$$
Taking common cos δ from C3 in first determinant and taking common – sin δ from C3 in second determinant.
$$=\space\text{cos}\space\delta\begin{vmatrix}\text{sin}\space\alpha &\text{cos}\space\beta &\text{cos}\space\alpha\\\text{sin}\space\beta &\text{cos}\space\beta &\text{cos}\space\beta\\\text{sin}\space\gamma &\text{cos}\space\gamma &\text{cos}\space\gamma\end{vmatrix}-\\\text{sin}\space\delta\begin{vmatrix}\text{sin}\space\alpha &\text{cos}\space\alpha & sin\space\alpha\\\text{sin}\space\beta &\text{cos}\space\beta &\text{sin}\space\beta\\\text{sin}\space\gamma &\text{cos}\space\gamma &\text{sin}\space\gamma\end{vmatrix}$$
=cos δ.0−sin δ.0 = 0
[Since, C2 and C3 in first determinant C1 and C3 in second determinant are identical so values of determinants are zero.]
Hence proved.
16. Solve the system of equations
$$\frac{\textbf{2}}{\textbf{x}}+\frac{\textbf{3}}{\textbf{y}}+\frac{\textbf{10}}{\textbf{z}} \textbf{= 4;}\\\frac{\textbf{4}}{\textbf{x}}-\frac{\textbf{6}}{\textbf{y}}+\frac{\textbf{5}}{\textbf{z}}\textbf{= 1}\\\textbf{and}\space\frac{\textbf{6}}{\textbf{x}} \textbf{+}\frac{\textbf{9}}{\textbf{y}}\textbf{-}\frac{\textbf{20}}{\textbf{x}} \textbf{= 2.}$$
$$\textbf{consider}\frac{\textbf{1}}{\textbf{x}} = \textbf{p},\frac{\textbf{1}}{\textbf{y}} = \textbf{q},\frac{\textbf{1}}{\textbf{z}} = \textbf{r}$$
to make a standard form of equations and use the matrix method to solve the three equations in p, q and r.
$$\textbf{Sol.\space}\text{Let}\space\frac{1}{x}=p,\frac{1}{y}= q\space\text{and}\frac{1}{z} = r,$$
then the given equations become
2p + 3q + 10r = 4, 4p – 6q + 5r = 1, 6p + 9q – 20r = 2
This system can be written as AX = B, where
$$\text{A =} \begin{bmatrix}2 &3 &10\\4 &\normalsize-6 &5\\6 &9 &\normalsize-20\end{bmatrix}\textbf{,}\\\text{X} =\begin{bmatrix}p\\q\\r\end{bmatrix},\text{B} =\begin{bmatrix}4 \\1\\2\end{bmatrix}\\\text{Here, |A| =}\begin{vmatrix}2 &3 &10\\4 &\normalsize-6 &5\\6 &9 &\normalsize-20\end{vmatrix}$$
= 2(120 – 45) – 3(– 80 – 30) + 10(36 + 36)
= 150 + 330 + 720 = 1200
Thus, A is non-singular. Therefore, its inverse exists.
Therefore, the above system is consistent and has a unique solution given by X = A–1B
Cofactors of A are
A11 = 120 – 45 = 75, A12 = – (– 80 – 30) = 110, A13 = (36 + 36) = 72
A21 = – (– 60 – 90) = 150, A22 = (– 40 – 60) = – 100, A23 = – (18 – 18) = 0,
A31 = 15 + 60 = 75, A32 = – (10 – 40) = 30, A33 = – 12 – 12 = – 24
$$\therefore\space\text{adj (A)} = \begin{vmatrix}75 &110 &72\\150 &-100 &0\\75 &30 &\normalsize-24\end{vmatrix}^{\text{T}}\\=\begin{bmatrix}75 &150 &75\\110 &-100 &30\\72 &0 &-24\end{bmatrix}\\\text{Now,\space}\text{A}^{\normalsize-1}\frac{1}{|\text{A}|}\space\text{(adj A)}\\=\frac{1}{1200}\begin{bmatrix}75 &150 &75\\110 &-100 &30\\72 &0 &\normalsize-24\end{bmatrix}\\\because\space\text{X} =\text{A}^{\normalsize-1}\text{B}$$
$$\Rarr\space\begin{bmatrix}p\\q\\r\end{bmatrix} =\frac{1}{1200}\\\begin{bmatrix}75 &150 &75\\110 &-100 &30\\72 &0 &-24\end{bmatrix}\begin{bmatrix}4 \\1 \\2\end{bmatrix}\\=\frac{1}{1200}\space\begin{bmatrix}300 + 150+150\\440-100+60\\288+0-48\end{bmatrix}\\=\frac{1}{1200}\begin{bmatrix}600\\400\\240\end{bmatrix}=\begin{bmatrix}\frac{1}{2}\\\frac{1}{3}\\\frac{1}{5}\end{bmatrix}\\\Rarr\space\text{p} =\frac{1}{2}, q =\frac{1}{3}, r =\frac{1}{5}$$
$$\Rarr\space\frac{1}{x} = \frac{1}{2}, \frac{1}{y}=\frac{1}{3}, \frac{1}{z}= \frac{1}{5}$$
⇒ x = 2, y = 3 and z = 5.
Choose the correct answer in Q. 17 to 19.
17. If a, b, c are in AP, then determinant
$$\begin{vmatrix}\textbf{x+2} &\textbf{x+3} &\textbf{x+2a}\\\textbf{x+3} &\textbf{x+4} &\textbf{x+2b}\\\textbf{x+4} &\textbf{x+5} &\textbf{x+2c}\end{vmatrix}\space\textbf{is :}$$
(a) 0
(b) 1
(c) x
(d) 2x
Sol. (a) 0
$$\text{Let A} = \begin{vmatrix}\text{x+2} &\text{x+3} &\text{x+2a}\\\text{x+3} &\text{x+4} &\text{x+2b}\\\text{x+4} &\text{x+5} &\text{x+2c}\end{vmatrix}\\=\frac{1}{2}\begin{vmatrix}x+2 &x+3 &x+2a\\0 &0 &2(2b-a-c)\\\text{x+4} &\text{x+5} &\text{x+2c}\end{vmatrix}$$
(using R2 → 2R2 – R1 – R3)
But a, b, c are in AP. Using 2b = a + c, we get
$$\text{A}=\frac{1}{2}\begin{vmatrix}x+2 &x+3 &x+2a\\0 &0 &0\\x+4 &x+5 &x+2c\end{vmatrix} = 0$$
[Since, all elements of R2 are zero]
18. If x, y, z are non-zero real numbers, then the inverse of matrix A =
$$\begin{bmatrix}\textbf{x} &\textbf{0} &\textbf{0}\\\textbf{0} &\textbf{y} &\textbf{0}\\\textbf{0} &\textbf{0} &\textbf{z}\end{bmatrix}\space\textbf{is :}\\\textbf{(a)\space}\begin{bmatrix}\textbf{x}^{\textbf{-1}} &\textbf{0} &\textbf{0}\\\textbf{0} &\textbf{y}^{\normalsize-1} &\textbf{0}\\\textbf{0} &\textbf{0} &\textbf{z}^{\normalsize-1}\end{bmatrix}\\\textbf{(b)\space}\textbf{xyz}\begin{bmatrix}\textbf{x}^{\normalsize-1} &\textbf{0} &\textbf{0}\\\textbf{0} &\textbf{y}^{\normalsize-1} &\textbf{0}\\\textbf{0} &\textbf{0} &\textbf{z}^{\normalsize-1}\end{bmatrix}\\\textbf{(c)\space}\frac{\textbf{1}}{\textbf{xyz}}\begin{bmatrix}\textbf{x} &\textbf{0} &\textbf{0}\\\textbf{0} &\textbf{y} &\textbf{0}\\\textbf{0} &\textbf{0} &\textbf{z}\end{bmatrix}$$
$$\textbf{(d)\space}\frac{\textbf{1}}{\textbf{xyz}}\begin{bmatrix}\textbf{1} &\textbf{0} &\textbf{0}\\\textbf{0} &\textbf{1} &\textbf{0}\\\textbf{0} &\textbf{0} &\textbf{1}\end{bmatrix}\\\textbf{Sol.\space}\text{(a)\space}\begin{bmatrix}x^{\normalsize-1}&0 &0\\0 &y^{\normalsize-1} &0\\0 &0 &z^{\normalsize-1}\end{bmatrix}\\\text{Given A =}\begin{bmatrix}x &0 &0\\0 &y &0\\0 &0 &z\end{bmatrix}\\\text{|A|} =\begin{vmatrix}x &0 &0\\0 &y &0\\0 &0 &z\end{vmatrix}$$
= x(yz - 0) = xyz ≠ 0
(∵ x, y and z are non-zero)
Cofactors of A are
A11 = (yz – 0) = yz, A12 = – (0 – 0) = 0, A13 = 0 – 0 = 0,
A21 = – (0 – 0) = 0, A22 = xz – 0 = xz, A23 = – (0 – 0) = 0,
A31 = 0 – 0 = 0, A32 = – (0 – 0) = 0, A33 = (xy – 0) = xy.
(∵ x, y and z are non-zero)
Cofactors of A are
A11 = (yz – 0) = yz, A12 = – (0 – 0) = 0, A13 = 0 – 0 = 0,
A21 = – (0 – 0) = 0, A22 = xz – 0 = xz, A23 = – (0 – 0) = 0,
A31 = 0 – 0 = 0, A32 = – (0 – 0) = 0, A33 = (xy – 0) = xy.
$$\therefore\space\text{adj (A)}= \begin{bmatrix}yz &0 &0\\0 &xz &0\\0 &0 &xy\end{bmatrix}^{\text{T}}\\=\begin{bmatrix}yz &0 &0\\0 &xz &0\\0 &0 &xy\end{bmatrix}\\\text{Now,\space A}^{\normalsize-1} =\frac{1}{|\text{A}|}\space\text{(adj A)}\\=\frac{1}{xyz}\begin{bmatrix}yz &0 &0\\0 &xz &0\\0 &0 &xy\end{bmatrix}$$
$$=\begin{bmatrix}\frac{1}{x} &0 &0\\0 &\frac{1}{y} &0\\0 &0 &\frac{1}{z}\end{bmatrix}\\=\begin{bmatrix}x^{\normalsize-1} &0 &0\\0 &y^{\normalsize-1} &0\\0 &0 &z^{\normalsize-1}\end{bmatrix}$$
$$\textbf{19.\space Let A =}\begin{bmatrix}\textbf{1} &\textbf{sin}\space\theta &\textbf{1}\\\textbf{-}\textbf{sin}\space\theta &\textbf{1} &\textbf{sin}\space\theta\\\textbf{-1} &-\textbf{sin}\space\theta &\textbf{1}\end{bmatrix}\textbf{,}$$
where 0 ≤ θ ≤ 2π, then
(a) det A = 0
(b) det A ∈ (2, ∞)
(c) det A ∈ (2, 4)
(d) det A ∈ (2, 4).
Sol. (d) det A ∈ (2, 4)
$$\text{Given, A = }\begin{bmatrix}1 &\text{sin}\space\theta &1\\-\text{sin}\space\theta &1 &\text{sin}\space\theta\\\normalsize-1 &-\text{sin}\space\theta &1\end{bmatrix}\\|\text{A}| =\begin{bmatrix}1 &\text{sin}\space\theta &1\\-\text{sin}\space\theta &1 &\text{sin}\space\theta\\\normalsize-1 &-\text{sin}\space\theta &1\end{bmatrix}$$
= 1( 1 + sin2θ) – sin θ(– sin θ + sin θ) + 1(sin2θ + 1)
= 2 + 2 sin2 θ
For 0 ≤ θ ≤ 2π,
– 1 ≤ sin θ ≤ 1 ⇒ 0 ≤ sin2θ ≤ 1
⇒ 1 ≤ 1 + sin2θ ≤ 2 ⇒ 2 ≤ 2(1 + sin2θ) ≤ 4
∴ det(A) ∈ [2, 4]
Share page on
NCERT Solutions Class 12 Mathematics
- Chapter 1 Relations and Functions
- Chapter 2 Inverse Trigonometric Functions
- Chapter 3 Matrices
- Chapter 4 Determinants
- Chapter 5 Continuity and Differentiability
- Chapter 6 Application of Derivatives
- Chapter 7 Integrals
- Chapter 8 Applications of the Integrals
- Chapter 9 Differential Equations
- Chapter 10 Vectors
- Chapter 11 Three-Dimensional Geometry
- Chapter 12 Linear Programming
- Chapter 13 Probability
CBSE CLASS 12 NCERT SOLUTIONS
- NCERT Solutions Class 12 English Core
- NCERT Solutions Class 12 Physics
- NCERT Solutions Class 12 Chemistry
- NCERT Solutions Class 12 Biology
- NCERT Solutions Class 12 Business Studies
- NCERT Solutions Class 12 Mathematics
- NCERT Solutions Class 12 Accountancy
- NCERT Solutions Class 12 Economics
- NCERT Solutions Class 12 Geography
- NCERT Solutions Class 12 History
- NCERT Solutions Class 12 Political Science
CBSE CLASS 12 SYLLABUS
- CBSE Class 12 English core Syllabus
- CBSE Class 12 Mathematics Syllabus
- CBSE Class 12 Physics Syllabus
- CBSE Class 12 Chemistry Syllabus
- CBSE Class 12 Biology Syllabus
- CBSE Class 12 Accountancy Syllabus
- CBSE Class 12 Business Studies Syllabus
- CBSE Class 12 Economics Syllabus
- CBSE Class 12 History Syllabus
- CBSE Class 12 Geography Syllabus
- CBSE Class 12 Political science Syllabus
- CBSE Class 12 Sociology Syllabus
- CBSE Class 12 Psychology Syllabus
- CBSE Class 12 Physical education Syllabus
- CBSE Class 12 Applied mathematics Syllabus
- CBSE Class 12 History of Indian Arts Syllabus
CBSE CLASS 12 Notes
- CBSE Class 12 Physics Notes
- CBSE Class 12 Chemistry Notes
- CBSE Class 12 Biology Notes
- CBSE Class 12 Maths Notes
- CBSE Class 12 Accountancy Notes
- CBSE Class 12 Business Studies Notes
- CBSE Class 12 Economics Notes
- CBSE Class 12 History Notes
- CBSE Class 12 Geography Notes
- CBSE Class 12 Political Science Notes
CBSE CLASS 12 BOOKS





