NCERT Solutions for Class 11 Physics Chapter 7 - System of Particles and Rotational Motion
NCERT Solutions for Class 11 Physics Chapter 7 Free PDF Download
Please Click on Free PDF Download link to Download the NCERT Solutions for Class 11 Physics Chapter 7 System of Particles and Rotational Motion
7.1. Give the location of the centre of mass of a (i) sphere, (ii) cylinder, (iii) ring, and (iv) cube, each of uniform mass density. Does the centre of mass of a body necessarily lie inside the body ?
Ans. The centre of mass (C.M.) can be defined as a point where the mass of a body is supposed to be concentrated. All of the structures are symmetrical bodies with a fairly consistent mass density. As a result, the centre of mass for all of the above bodies will be in their geometric centres.
The centre of mass of a body does not always have to be inside it; for example, the centre of mass of a circular ring is at its centre.
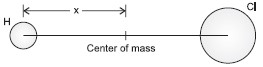
7.2. In the HCl molecule, the separation between the nuclei of the two atoms is about 1.27 Å (1 Å = 10–10 m). Find the approximate location of the CM of the molecule, given that a chlorine atom is about 35.5 times as massive as a hydrogen atom and nearly all the mass of an atom is concentrated in its nucleus.
Ans. Mass of hydrogen atom = 1 unit
Mass of chlorine atom = 35.5 unit
(As a chlorine atom is 35.5 times the
size of hydrogen atom)
Let the center of mass lie at a distance x from the chlorine atom
Thus, the distance of center of mass from the hydrogen atom = 1.27 – x
Assuming that the center of mass of HCL lies at the origin,
Hydrogen will lie on the left side of the origin and chlorine lie on the right side of the origin
$$\text{x} = \frac{-m(127 - x) + 35.5\text{ mx})}{(m + 35.5 m)}$$
– m( 1.27 – x) + 35.5 mx = 0
– 1.27+ x + 35.5 x = 0
36.5x = 1.27
$$\text{Therefore }\space \text{x} = \frac{1.27}{36.5}$$
= 0.035 Å
The center of mass lies at 0.035 Å from the chlorine atom.
7.3. A child sits stationary at one end of a long trolley moving uniformly with a speed V on a smooth horizontal floor. If the child gets up and runs about on the trolley in any manner, what is the speed of the CM of the (trolley + child) system ?
Ans. There will be no change in the speed of the provided system's center of mass. The child is haphazardly running on a trolley that is travelling forward at v. The child's running, on the other hand, will have no effect on the trolley's center of mass velocity.
This occurs because the force generated by the child's motion is entirely internal. Internal forces in a body have no effect on the motion of the bodies they interact with. Because there is no external force acting on the (child + trolley) system, the child's motion will have no effect on the trolley's center of mass speed.
7.4. Show that the area of the triangle contained between the vectors a and b is one half of the magnitude of a × b.
Ans. $$\text{Let} \overrightarrow{a} \text{be represented} \overrightarrow{OP} { and } \overrightarrow{b} \text{be represented by} \overrightarrow{OQ}.
Let ∠POQ = q, Fig.
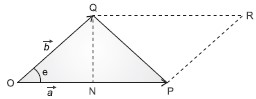
Complete the || gm OPRQ.
Joint OQ.
Draw QN ⊥ OP
$$\text{In ΔOQN, sin θ} = \frac{QN}{OQ} = \frac{QN}{b}$$
QN = b sin θ
Now, by definition,
$$ | \overrightarrow{a} × \overrightarrow{a}| = \text{ab sin θ = (OP) (QN)} \\ = \frac{2(OP)(QN)}{2} \\ \text{= 2 × area of ΔOPQ} \\ \therefore \space \text{Area of ΔOPQ} = \frac{1}{2}| \overrightarrow{a} × \overrightarrow{b} |,$$
which was to be proved.
7.5. Show that a.(b × c) is equal in magnitude to the volume of the parallelopiped formed on the three vectors , a, b and c.
Ans. Let a parallelopiped be formed on the three vectors.
$$ \overrightarrow{OA} = \overrightarrow{a}, \overrightarrow{OB} = \overrightarrow{b}\text{ and } \overrightarrow{OC} = \overrightarrow{c}$$
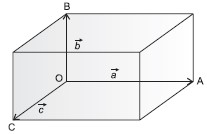
$$\text{Now, } \space \space \overrightarrow{b}×\overrightarrow{c} = \text{bc sin 90° }\hat{n} = \text{ bc } \hat{n} \\ \text{when }\hat{n} \text{is unit vector along }\overrightarrow{OA} \text{ perpendicular to the plane containing } \overrightarrow{b} \text{ and } \overrightarrow{c}. \\ \text{ Now } \space \overrightarrow{a}.(\overrightarrow{b}×\overrightarrow{c}) = \overrightarrow{a}. \text{bc }\hat{n} $$
= (a) (bc) cos 0°
= abc
which is equal in magnitude to the volume of the parallelopiped.
7.6. Find the components along the x, y, z axes of the angular momentum l of a particle, whose position vector is r with components x, y, z and momentum is p with components px, py and pz. Show that if the particle moves only in the x-y plane the angular momentum has only a z-component.
Ans. We know that angular momentum $$\overrightarrow{l} \text{ of a particle having position vector }\overrightarrow{r} \text{ and momentum }\overrightarrow{p} \text{ is given by } \\ \overrightarrow{l} = \overrightarrow{r}×\overrightarrow{p} \\ \text{But }\overrightarrow{r} = [x\hat{i} + y\hat{j}+z\hat{k}], \text{where x, y, z are the components of} \\ \overrightarrow{r} \text{ and } \overrightarrow{\text{p}} = [\text{p}_x\hat{i} + \text{p}_y\hat{j} + \text{p}_z\hat{k}] \\ \overrightarrow{l}= \overrightarrow{r} × \overrightarrow{\text{p}} \\ =[x\hat{i}+y\hat{j} +z\hat{k}] × [\text{p}_x\hat{i}+\text{p}_y\hat{j}+\text{p}_z\hat{k}]\\ \space \text{or } (\text{l}_x\hat{i}+\text{l}_y\hat{j}+\text{l}_z\hat{k}) \\ = \begin{vmatrix}\hat{i} & \hat{j} & \hat{k} \\ x & y & z \\ p_x & p_y & p_z \end{vmatrix} \\ = (\text{yp}_z - \text{zp}_y)\hat{i} + (\text{zp}_x - \text{xp}_z)\hat{j} + (\text{xp}_y - \text{yp}_z)\hat{k}$$
From this relation, we conclude that
lx = ypz – zpy
ly = zpx – xpz
and lz = xpy – ypx
If the given particle moves any in the x – y plane, then z = 0 and pz = 0 and hence, $$\overrightarrow{l} = (\text{xp}_y - \text{yp}_x)\hat{k}, \\ \text{ which is only the z-component of } \overrightarrow{l} $$
It means that for a particle moving only in the x – y plane, the angular momentum has only the z-component.
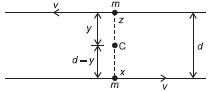
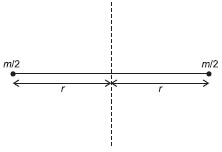
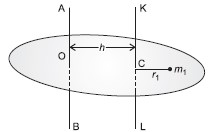
7.7. Two particles, each of mass m and speed v, travel in opposite directions along parallel lines separated by a distance d. Show that the angular momentum vector of the two particle system is the same whatever be the point about which the angular momentum is taken.
Ans. Let us consider three points be Z, C and X :
Angular momentum at Z.
LZ = mv × 0 + mv d
= mvd ...(1)
Angular momentum about x,
LX = mv × d + mv × 0
= mvd ...(2)
Angular momentum about C,
LC = mv × y + mv (d – y)
= mvd ...(3)
Thus we can see that;
LZ = LX = LC
This proves that the angular momentum of a system does not depend on the point about which its taken.
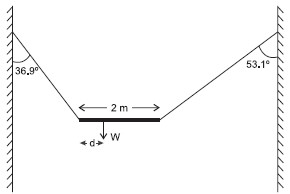
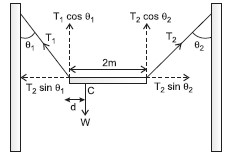
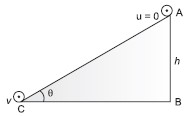
7.8. A non-uniform bar of weight W is suspended at rest by two strings of negligible weight as shown in Fig.7.39. The angles made by the strings with the vertical are 36.9° and 53.1° respectively. The bar is 2 m long. Calculate the distance d of the centre of gravity of the bar from its left end.7.8. A non-uniform bar of weight W is suspended at rest by two strings of negligible weight as shown in Fig.7.39. The angles made by the strings with the vertical are 36.9° and 53.1° respectively. The bar is 2 m long. Calculate the distance d of the centre of gravity of the bar from its left end.
Ans.
As it is clear from Fig.,
θ1 = 36.9°, θ2 = 53.1°
If T1, T2 are the tensions in the two strings, then for equilibrium along the horizontal,
T1 sin θ1 = T2 sin θ2
$$\text{or } \frac{\text{T}_1}{\text{T}_2} = \frac{\text{sin θ}_2}{\text{sin θ}_1} = \frac{\text{sin 53.1°}{\text{sin 36.9°}}\\ = \frac{0.7403}{0.5477} = 1.3523 $$
Let d be the distance of centre of gravity C of the bar from the left end.
For rotational equilibrium about C,
T1 cos θ1 × d = T2 cos θ2 (2 – d)
T1 cos 36.9° × d = T2 cos 53.1° (2 – d)
T1 × 0.8366 d = T2 × 0.6718 (2 – d)
Put T1 = 1.3523 T2 and solve to get
d = 0.745 m.
7.9. A car weighs 1800 kg. The distance between its front and back axles is 1.8 m. Its centre of gravity is 1.05 m behind the front axle. Determine the force exerted by the level ground on each front wheel and each back wheel.
Ans. Let F1 and F2 be the forces exerted by the level ground on front wheels and back wheels respectively. Considering rotational equilibrium about the front wheels.
F2 × 1.8 = mg × 1.05
$$\text{or } \space \text{F}_2 = \frac{1.05}{1.8}× 1800 × 9.8 \text{N}$$
= 10290 N
Force on each back wheel is
$$= \frac{10290}{2}\text{N or 5145 N}$$
Considering rotational equilibrium about the back wheels.
F1 × 1.8 = mg (1.8 – 1.05)
= 0.75 × 1800 × 9.8
or F1 = 0.75 × 1800 × 9.8/1.8
= 7350 N
Force on each front wheel is 7350/2 N or 3675 N.
7.10. (a) Find the moment of inertia of a sphere about a tangent to the sphere, given the moment of inertia of the sphere about any of its diameters to be $$\frac{2}{5}\text{MR}^2,$$ where M is the mass of the sphere and R is the radius of the sphere.
(b) Given the moment of inertia of a disc of mass M and radius R about any of its diameters to be MR2/4, find its moment of inertia about an axis normal to the disc and passing through a point on its edge.
Ans. (a) Moment of inertia of sphere about any diameter = 2/5 MR2
Applying theorem of parallel axes, Moment of inertia of sphere about a tangent to the
$$\text{sphere} = \frac{2}{5}\text{MR}^2 + \text{M(R)}^2 = \frac{7}{5} \text{MR}^2 $$
(b) We are given, moment of inertia of the disc about any of its diameters = $$\frac{1}{4}\text{MR}^2$$
(i) Using the theorem of perpendicular axes, moment of inertia of the disc about an axis passing through its centre and normal to the $$\text{disc} = 2 × \frac{1}{4}\text{MR}^2 = \frac{1}{2}\text{MR}^2$$
(ii) Using theorem axes, moment of inertia of the disc passing through a point on its edge and normal to the dies = $$\frac{1}{2} \text{ MR}^2 + \text{ MR}^2 = \frac{3}{2} \text{MR}^2$$
7.11. Torques of equal magnitude are applied to a hollow cylinder and a solid sphere, both having the same mass and radius. The cylinder is free to rotate about its standard axis of symmetry, and the sphere is free to rotate about an axis passing through its centre. Which of the two will acquire a greater angular speed after a given time.
Ans. Let M be the mass and R the radius of the hollow cylinder, and also of the solid sphere.
Their moments of inertia about the respective $$\text{axes are I}_1 = \text{MR}^2 \text{ and } \text{I}_2 = \frac{2}{5} \text{MR}^2$$
Let τ be the magnitude of the torque applied to the cylinder and the sphere, producing angular accelerations α1 and α2 respectively. Then τ = I1 α1 = I2 α2
It is clear that the angular velocity of the solid sphere will be greater than that of the hollow cylinder.
7.12. A solid cylinder of mass 20 kg rotates about its axis with angular speed 100 rad s–1. The radius of the cylinder is 0.25 m. What is the kinetic energy associated with the rotation of the cylinder ? What is the magnitude of angular momentum of the cylinder about its axis ?
Ans. M = 20 kg
Angular speed, ω = 100 rad s–1; R = 0.25 m
Moment of inertia of the cylinder about its axis $$= \frac{1}{2} \text{MR}^2 \\ = \frac{1}{2}× 20\space (0.25)^2 \text{kg m}^2$$
= 0.625 kg m2
Rotational kinetic energy,
$$\text{E}_r = \frac{1}{2} \text{Iω}^2 = \frac{1}{2} × 0.625 × (100)^2 \text{J}$$
= 3125 J
Angular momentum,
L = Iω = 0.625 × 100 Js = 62.5 Js.
7.13. (a) A child stands at the centre of a turntable with his two arms outstretched. The turntable is set rotating with an angular speed of 40 rev/min. How much is the angular speed of the child if he folds his hands back and thereby reduces his moment of inertia to 2/5 times the initial value ? Assume that the turntable rotates without friction.
(b) Show that the child’s new kinetic energy of rotation is more than the initial kinetic energy of rotation. How do you account for this increase in kinetic energy ?
Ans. (a) Suppose, initial moment of inertia of the child is I1. Then final moment of inertia, $$\text{I}_2 = \frac{2}{5}\text{I}_1$$
Also, ν1 = 40 rev min–1
By using the principle of conservation of angular momentum, we get
I1ω1 = I2ω2 or I1 (2πν1) = I2(2πν2) $$\text{or }ν_2 = \frac{I_1ν_1}{I_2} = \frac{I_1 × 40}{\frac{2}{5}× I_1}\\ \text{= 100 rev min}^{-1} \\ \text{(b) } \frac{\text{Final K.E. of rotation}}{\text{Initial K.E. of rotation}} \\ = \frac{\frac{1}{2}\text{I}_2\text{ω}_2^2}{\frac{1}{2}\text{I}_1\text{ω}_1^2} = \frac{\frac{1}{2}\text{I}_2(2\pi ν_2)^2}{\frac{1}{2}\text{I}_1(2\pi ν_1)^2} \\ = \frac{\text{I}_2\text{ν}_2^2}{\text{I}_1\text{ν}_1^2} = \frac{\frac{2}{5}\text{I}_1×(100)^2}{\text{I}_1 × (40)^2}$$
= 2.5
Clearly, final (K.E.)rot becomes more because the child uses his internal energy when he folds his hands to increases the kinetic energy.
7.14. A rope of negligible mass is wound round a hollow cylinder of mass 3 kg and radius 40 cm. What is the angular acceleration of the cylinder if the rope is pulled with a force of 30 N ? What is the linear acceleration of the rope ? Assume that there is no slipping.
Ans. Here, M = 3 kg, R = 40 cm = 0.4 m
Moment of inertia of the hollow cylinder about its axis.
I = MR2 = 3(0.4)2 = 0.48 kg m2
Force applied F = 30 N
∴ Torque, τ = F × R = 30 × 0.4 = 12 N–m.
If α is angular acceleration produced, then from
τ = Iα
$$\alpha = \frac{τ}{I} = \frac{12}{0.48}$$
= 25 rad s–2
Linear acceleration,
a = Rα = 0.4 × 25 = 10 ms–2.
7.15. To maintain a rotor at a uniform angular speed of 200 rad s–1, an engine needs to transmit a torque of 180 N m. What is the power required by the engine ? (Note: uniform angular velocity in the absence of friction implies zero torque. In practice, applied torque is needed to counter frictional torque). Assume that the engine is 100% efficient.
Ans. Here, a = 200 rad s-1; Torque, τ = 180 N-m
Since,Power,
P = Torque (τ) × angular speed (w)
= 180 × 200 = 36000 watt
= 36 KW.
7.16. From a uniform disk of radius R, a circular hole of radius R/2 is cut out. The centre of the hole is at R/2 from the centre of the original disc. Locate the centre of gravity of the resulting flat body.
Ans. Let from a bigger uniform disc of radius R with center O a smaller circular hole of radius R/2 with its center at O1 (where OO1 = R/2) is cut out. Let the centre of gravity or the center of mass of the remaining flat body be at O2, where OO2 = x. If σ be mass per unit area, then mass of whole disc M1 = πR2σ and mass of cut out part
$$\text{M}_2 = \pi \left(\frac{R}{2}\right)^2 σ \\ = \frac{1}{4}\pi\text{R}^2σ = \frac{\text{M}_1}{4} \\ \therefore \space \space x = \frac{\text{M}_1 × (0) - \text{M}_2\text{(OO}_1)}{M_1-M_2} \\ =\frac{0-\frac{\text{M}_1}{4}× \frac{\text{R}}{2}}{\text{M}_1 - \frac{\text{M}_1}{4}} = -\frac{\text{R}}{6}$$
i.e., O2 is at a distance R/6 from the centre of the disc on the diametrically opposite side to the centre of hole.
7.17. A metre stick is balanced on a knife edge at its centre. When two coins, each of mass 5 g are put one on top of the other at the 12.0 cm mark, the stick is found to be balanced at 45.0 cm. What is the mass of the metre stick?
Ans. Let m be the mass of the stick concentrated at C, the 50 cm mark, see fig.
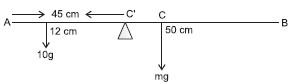
For equilibrium about C, the 45 cm mark,
10 g (45 – 12) = mg (50 – 45)
10 g × 33 = mg × 5
⇒ m = 10 × 33/5
or m = 66 grams
7.18. A solid sphere rolls down two different inclined planes of the same heights but different angles of inclination. (a) Will it reach the bottom with the same speed in each case? (b) Will it take longer to roll down one plane than the other? (c) If so, which one and why ?
Ans. (a) Using law of conservation of energy.
$$\frac{1}{2}\text{mv}^2 + \frac{1}{2}\text{Iω}^2 = \text{mgh} \\ \text{or } \frac{1}{2}\text{mv}^2 + \frac{1}{2}\left(\frac{2}{5}\text{mR}^2\right)\frac{\text{v}^2}{\text{R}^2} = \text{mgh} \\ \text{or }\frac{7}{10}\text{v}^2 = \text{gh} \\ \text{or }\space \text{v = }\sqrt{\frac{10\text{ gh}}{7}} \\ \text{Since h is same for both the inclined planes therefore v is the same.} \\ \text{(b) }\space \text{l} = \frac{1}{2}\left(\frac{\text{g sin θ}}{1 + \frac{\text{K}^2}{\text{R}^2}} \right) \\ \text{t}^2 = \frac{\text{g sin θ}}{2\left(1+\frac{2}{5}\right)}\\ \text{t}^2 = \frac{\text{5g sin θ}}{14}\text{t}^2 \\ \text{or } \space \space \text{t} = \sqrt{\frac{14l}{\text{5g sin θ}}} \\ \text{Now,} \space \space \text{sin θ} = \frac{\text{h}}{l} \space \text{or } \text{l} = \frac{\text{h}}{\text{sin θ}} \\ \therefore \space \space \text{t} = \frac{1}{\text{sin θ}}\sqrt{\frac{14\text{h}}{5\text{g}}}$$
Lesser the value of q, more will be t.
(c) Clearly, the solid sphere will take longer to roll down the plane with smaller inclination.
7.19. A hoop of radius 2 m weighs 100 kg. It rolls along a horizontal floor so that its centre of mass has a speed of 20 cm/s. How much work has to be done to stop it ?
Ans. Here, R = 2 m, M = 100 kg
v = 20 cm/s = 0.2 m/s
Total energy of the hoop
$$= \frac{1}{2}\text{Mv}^2 + \frac{1}{2}\text{Iω}^2 \\ = \frac{1}{2}\text{Mv}^2 + \frac{1}{2}(\text{MR}^2)\text{ω}^2 \\ = \frac{1}{2}\text{Mv}^2 + \frac{1}{2}\text{Mv}^2 = \text{Mv}^2$$
Work required to stop the hoop
= total energy of the hoop
$$ \text{W} = \text{Mv}^2 = 100 (0.2)^2 = \text{4 Joule.}$$
$$\text{As K.E. of rotation = }\frac{2}{3}\text{K.E. of translation} \\ \therefore \space \space \frac{1}{2}\text{Iω}^2 = \frac{2}{3}×\frac{1}{2}\text{mω}^2 \\ \frac{1}{2}\text{(mr}^2)ω^2 = \frac{1}{2}\text{mv}^2 \\ ω = \sqrt{\frac{2}{3}}\frac{v}{r} = \sqrt{\frac{2}{3}}× \frac{500}{0.61 × 10^{-10}} $$
= 6.7 × 1012 rad/s.
7.21. A solid cylinder rolls up an inclined plane of angle of inclination 30°. At the bottom of the inclined plane the centre of mass of the cylinder has a speed of 5 m/s.
(a) How far will the cylinder go up the plane?
(b) How long will it take to return to the bottom?
Ans. (a) Here, θ = 30°, v = 5 m/s
Let the cylinder go up the plane up to a height h.
$$\text{ From }\space \frac{1}{2}\space \text{mv}^2 + \frac{1}{2}\space \text{Iω}^2 = \text{mgh}\\ \frac{1}{2} \space \text{mv}^2 + \frac{1}{2}\left( \frac{1}{2}\text{mr}^2\right)\text{ω}^2 = \text{mgh}\\ \frac{3}{4}\text{mv}^2 = \text{mgh} \\ \text{h} = \frac{3v^2}{4g}= \frac{3×5^2}{4×9.8} = 1.913 \space \text{m}$$
If s be the distance up the inclined plane, then as
$$\text{sin } \theta = \frac{\text{h}}{\text{s}}, \text{ s} = \frac{\text{h}}{\text{sin }\theta} = \frac{1.913}{\text{sin 30°}} = 3.856 \text{ m}$$
(b) Time taken to return to the bottom
$$\text{t} = \sqrt{\frac{2\text{s}\left(1+ \frac{\text{k}^2}{\text{r}^2} \right)}{\text{g sin }\theta}} = \sqrt{\frac{2×3.826\left(1+\frac{1}{2} \right)}{9.8 \text{ sin 30°}}} = 1.53 \text{ m}$$
Same amount of time would require to reach the bottom of the inclined plane.
Therefore, total time T = 1.53 + 1.53
= 3.0 s
7.22. As shown in Fig.7.40, the two sides of a step ladder BA and CA are 1.6 m long and hinged at A. A rope DE, 0.5 m is tied half way up. A weight 40 kg is suspended from a point F, 1.2 m from B along the ladder BA. Assuming the floor to be frictionless and neglecting the weight of the ladder, find the tension in the rope and forces exerted by the floor on the ladder.
(Take g = 9.8 m/s2) (Hint: Consider the equilibrium of each side of the ladder separately.)
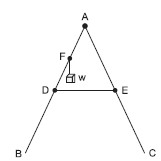
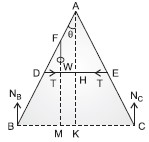
Ans. The forces acting on the ladder are shown in Fig. 7.14. Here w = 40 kg = 40 × 9.8 N = 392 N,
$$\text{AB = AC = 1.6 m, BD = }\frac{1}{2} \text{× 1.6 m = 0.8 m,}$$
BF = 1.2 m and DE = 0.5 m,
In the fig. ΔADE and ΔABC are similar triangles, hence
$$\text{BC} = \text{DE} × \frac{\text{AB}}{\text{AD}} = \frac{0.5×1.6}{0.8} = 1.0 \text{m}$$
Now, considering equilibrium at point B,
Στ = 0
∴ W × (MB) = NC × (CB) ...(i)
$$\text{But } \text{M}_B = \frac{\text{KB}×\text{BF}}{\text{BA}}= \frac{0.5×1.2}{1.6} = 0.375 \space \text{m}$$
Substituting this value in (i), we get
$$\therefore \space \space \text{N}_C = \frac{\text{W × (MB)}}{\text{(CB)}} = \frac{392×0.375}{1} = 147 \text{N}$$
Again considering equilibrium at point C in similar manner, we have
W × (MC) = NB × (BC)
$$\therefore \space \text{N}_B = \frac{\text{W×(MC)}}{\text{(BC)}} = \frac{\text{W × (BC - BM)}}{\text{(BC)}}$$
= (392 × (1 – 0.375))/1 = 245 N
Now, it can be easily shown that tension in the string T = NB – NC = 245 – 147 = 98 N
7.23. A man stands on a rotating platform, with his arms stretched horizontally holding a 5 kg weight in each hand. The angular speed of the platform is 30 revolutions per minute. The man then brings his arms close to his body with the distance of each weight from the axis changing from 90 cm to 20 cm. The moment of inertia of the man together with the platform may be taken to be constant and equal to 7.6 kg m2.
(a) What is his new angular speed? (Neglect friction.)
(b) Is kinetic energy conserved in the process? If not, from where does the change come about?
Ans. (a) Here, I1 = 7.6 + 2 × 5 (0.9)2 = 15.7 kg m2
ω1 = 30 rpm
I2 = 7.6 + 2 × 5 (0.2)2 = 8.0 kg m2
ω2 = ?
According to the principle of conservation of angular momentum,
I2ω2 = I1ω1
$$\text{ω}_2 = \frac{I_1}{I_2} . \text{ ω}_1 = 15.7 × \frac{30}{80}. = 58.88 \text{ rpm}$$
(b) There is a change in kinetic energy, with the decrease in the moment of inertia, kinetic energy increases. The extra kinetic energy is supplied to the system by the work done by the man in folding his arms inside
7.24. A bullet of mass 10 g and speed 500 m/s is fired into a door and gets embedded exactly at the centre of the door. The door is 1.0 m wide and weighs 12 kg. It is hinged at one end and rotates about a vertical axis practically without friction. Find the angular speed of the door just after the bullet embeds into it. (Hint: The moment of inertia of the door about the vertical axis at one end is ML2/3.)
Ans. Angular momentum imparted by the bullet,
L = mv × r
= (10 × 10–3) × 500 × 0.5 = 2.5
$$\text{Also, } \space \space \text{I} = \frac{\text{ML}^2}{3} = 12 ×(1.0)^2/3$$
= 4 kg m2
Since L = Iω
$${ω} = \frac{\text{L}}{\text{I}} = \frac{2.5}{4} = 0.625 \text{ rad /s}$$
7.25. Two discs of moments of inertia I1 and I2 about their respective axes (normal to the disc and passing through the centre), and rotating with angular speeds ω1 and ω2 are brought into contact face to face with their axes of rotation coincident.
(a) What is the angular speed of the two-disc system?
(b) Show that the kinetic energy of the combined system is less than the sum of the initial kinetic energy of the two discs. How do you account for this loss in energy? Take ω1 ≠ ω2.
Ans. (a) Let I1 and I2 be the moments of inertia of two discs having angular speeds ω1 and ω2 respectively. When they are brought in contact, the moment of inertia of the two-disc system will be I1 + I2. Let the system now have an angular speed ω. From the law of conservation of angular momentum, we know that
I1ω1 + I2ω2 = (I1 + I2)ω
∴ The angular speed of the two-disc system,
$$ \text{ω} = \frac{1}{2}\text{I}_1\text{ω}_1^2 + \frac{1}{2}\text{I}_2\text{ω}_2^2 $$
(b) The sum of kinetic energies of the two discs before coming in contact,
$$\text{k}_1 = \frac{1}{2}\text{I}_1\text{ω}_1^2 + \frac{1}{2} \text{I}_2 \text{ω}_2^2$$
The final kinetic energy of the two-disc system,
$$\text{k}_1 = \frac{1}{2}(\text{I}_1 + \text{I}_2)\text{ω}^2 \\ =\frac{1}{2}(\text{I}_1 + \text{I}_2) × \left(\frac{\text{I}_1\text{ω}_1+\text{I}_2\text{ω}_2}{\text{I}_1+\text{I}_2}\right)^2 \\ = \frac{1}{2}\left(\frac{\text{I}_1\text{ω}_1+\text{I}_2\text{ω}_2}{\text{I}_1+\text{I}_2}\right)^2 \\\text{Now, } \text{k}_1-\text{k}_2 \\ = \frac{1}{2}\text{I}_1\text{ω}_1^2+\frac{1}{2}\text{I}_2\text{ω}_2^2-\frac{1}{2}\left(\frac{\text{I}_1\text{ω}_1+\text{I}_2\text{ω}_2}{\text{I}_1+\text{I}_2}\right)^2 \\ = \frac{1}{2(\text{I}_1+\text{I}_2)}×[(\text{I}_1\text{ω}_2^2+\text{I}_2\text{ω}_2^2)(\text{I}_1+\text{I}_2)-(\text{I}_1^2\text{ω}_1^2+\text{I}_2^2\text{ω}_2^2+2\text{I}_1\text{I}_2\text{ω}_1\text{ω}_2)] \\ =\frac{1}{2(\text{I}_1+\text{I}_2)}×[\text{I}_1^2\text{ω}_1^2 + \text{I}_2^2\text{ω}_2^2+\text{I}_1\text{I}_2\text{ω}_1^2+\text{I}_1\text{I}_2\text{ω}_2^2-\text{I}_1^2\text{ω}_1^2-\text{I}_2^2\text{ω}_2^2-2\text{I}_1\text{I}_2\text{ω}_1\text{ω}_2] \\ =\frac{1}{2(\text{I}_1+\text{I}_2)}[\text{I}_1\text{I}_2(\text{ω}_1^2+\text{ω}_2^2-2\text{ω}_1\text{ω}_2)]\\ =\frac{\text{I}_1\text{I}_2}{2(\text{I}_1+\text{I}_2)}(\text{ω}_1-\text{ω}_2)^2 $$
Now, (ω1 – ω2)2 will be positive whether ω1 is greater or smaller than ω2. Also,
I1I2 /2 (I1+ I2) is also positive because I1 and I2 are positive.
Thus, k1– k2 is a positive quantity.
∴ k1 = k2 + a positive quantity or k1 > k2
∴ The kinetic energy of the combined system (k2) is less than the sum of the kinetic energies of the two dies. The loss of energy on combining the two discs is due to the energy being used up because of the frictional forces between the surfaces of the two discs. These forces, in fact, bring about a common angular speed of the two discs on combining.
7.26. (a) Prove the theorem of perpendicular axes. (Hint : Square of the distance of a point (x, y) in the x – y plane from an axis through the origin and perpendicular to the plane is x2 + y2).
(b) Prove the theorem of parallel axes.
(Hint : If the centre of mass of a system of n particles is chosen to be the origin$$\sum m_ir_i = 0$$
Ans. (a) The theorem of perpendicular axes : According to this theorem, the moment of inertia of a plane lamina (i.e., a two dimensional body of any shape/size) about any axis OZ perpendicular to the plane of the lamina is equal to sum of the moments of inertia of the lamina about any two mutually perpendicular axes OX and OY in the plane of lamina, meeting at a point where the given axis OZ passes through the lamina. Suppose at the point ‘R’ m{ particle is situated moment of inertia about Z axis of lamina
= moment of inertia of body about x-axis
= moment of inertia of body about the y-axis
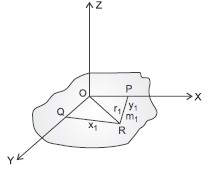
(b) Theorem of parallel axes : According to this theorem, moment of inertia of a rigid body about any axis AB is equal to moment of inertia of the body about another axis KL passing through centre of mass C of the body in a direction parallel to AB, plus the product of total mass M of the body and square of the perpendicular distance between the two parallel axes. If h is perpendicular distance between the axes AB and KL, then Suppose rigid body is made up of n particles
m1, m2, …. mn, mn at perpendicular distances r1, r2, ri …. rn. respectively from the axis KL passing through centre of mass C of the body.
If h is the perpendicular distance of the particle of mass m{from KL, then
The perpendicular distance of ith particle from the axis
AB = (ri + n) ...(i) $$\text{or }\space \text{I}_{\text{AB}} = \sum_{\substack{i}}\text{m}_i(\text{r}_i + \text{h})^2 \\ =\sum_{\substack{i}}\text{m}_i(\text{r}_i^2 + \text{h}^2 +2\text{r}_i\text{h}) \\ = \sum_{\substack{i}}\text{m}_i\text{r}_i^2 + \sum\text{m}_i\text{h}^2 +2\text{h}\sum\text{m}_i\text{r}_i\space \space ...\text{(ii)}$$ As the body in balanced about the centre of mass, the algebraic sum of the moments of the weights of all particles about on axis passing through C must be zero.
$$\sum_{\substack{i}}(\text{m}_i\text{g})\text{r}_i = 0 \text{ or g }\sum_{\substack{i}}\text{m}_i\text{r}_i \\ \text{ or } \sum_{\substack{i}}\text{m}_i\text{r}_i = 0 \space \space...\text{(iii)}$$From equation (ii), we have $$ \text{I}_{\text{AB}} = \sum_{\substack{i}}\text{m}_i\text{r}_i^2 + \left(\sum \text{m}_i\right)\text{h}^2 + 0 \\ \text{or }\space \space \text{I}_{\text{AB}} = \text{I}_{\text{KL}} + \text{Mh}^2 \\ \text{where }\space \space \text{I}_{\text{KL}} = \sum_{\substack{i}}\text{m}_i\text{r}_i^2 \\ \text{and } \space \space \text{M } = \sum \text{m}_i$$
7.27. Prove the result that the velocity v of translation of a rolling body (like a ring, disc, cylinder or sphere) at the bottom of an inclined plane of a height h is given by $$\text{v}^2 = \frac{2 \text{ gh}}{(1 + \text{k}^2 / \text{R}^2)}$$ using dynamical consideration (i.e., by consideration of forces and torques). Note k is the radius of gyration of the body about its symmetry axis, and R is the radius of the body. The body starts from rest at the top of the plane.
7.28. A disc rotating about its axis with angular speed ω0 is placed lightly (without any translational push) on a perfectly frictionless table. The radius of the disc is R. What are the linear velocities of the points A, B and C on the disc shown in Fig. 7.41? Will the disc roll in the direction indicated ?
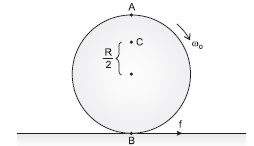
Ans. Since v = rω,
For point A, vA = Rω0 in the direction of arrow.
For point B, vB = Rω0 in the opposite direction of arrow.
$$\text{For point C, v}_C = \frac{R}{2}ω_0 \text{ in the direction of arrow.}$$ The disc will not roll in the given direction because friction is necessary for the same.
7.29. Explain why friction is necessary to make the disc in Fig. 7.41 roll in the direction indicated.
(a) Give the direction of frictional force at B, and the sense of frictional torque, before perfect rolling begins.
(b) What is the force of friction after perfect rolling begins ?
Ans. (a) The frictional force of disc must be in the opposite direction of its velocity. The frictional force operates to the left because it opposes the velocity direction at point B, which is to the right.
(b) Because the force of friction at point B operates in the opposite direction of the velocity, perfect rolling begins only when the force of friction at that point equals zero. As a result, the friction force acting on the disc is equal to zero.
7.30. A solid disc and a ring, both of radius 10 cm are placed on a horizontal table simultaneously, with initial angular speed equal to 10π rad s–1. Which of the two will start to roll earlier ? The coefficient of kinetic friction is μk = 0.2.
Ans. When a disc or ring starts rotatory motion on a horizontal surface, initial translational velocity of centre of mass is zero.
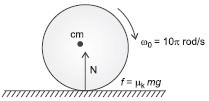
The frictional force causes the centre of mass to accelerate linearly but frictional torque causes angular retardation. As force of normal reaction N = mg, hence frictional force f = uk N = uk mg.
For linear motion f = uk . mg = ma ...(i)
And for rotational motion,
τ = f. R = μk mg. R = – Iα ...(ii)
Let perfect rolling motion starts at time t, when v = Rω
From (i), a = μk . g
v = u + at = 0 + μk. g . t ...(iii)
$$\text{From (ii), } \alpha = -\frac{{\mu}_k.\text{ mgR}}{\text{I}} = -\frac{{\mu}_k.\text{ mgR}}{\text{mK}^2} = -\frac{{\mu}_k.\text{ gR}}{\text{K}^2} \\ \therefore ω = ω_0 +\alpha \text{t}\space =\space ω_0-\frac{{\mu}_k.\text{ gR}}{\text{K}^2}t\\ \text{Since v = Rω, hence}\\ \mu_{k}.\text{g}.\text{t } = \text{R}\begin{bmatrix}ω_0-\mu_k.\frac{\text{gR}}{\text{K}^2}t\end{bmatrix} \\ \Rightarrow \space \space t^2 = \frac{\text{Rω}_0}{{\mu}_k.\text{g}\left(1+\frac{\text{R}^2}{\text{K}^2}\right)} \\ \text{For disc, }\text{K}^2 = \frac{\text{R}^2}{2},\text{hence} \\ \text{t = } \frac{\text{ω}_0\text{R}}{{\mu}_k.\text{g}\left(1+\frac{\text{R}^2}{\text{R}^2/2}\right)} = \frac{ω_0\text{R}}{3{\mu}_k.\text{g}} \\ \text{For ring, }\text{K}^2 = \text{R}^2,\text{ hence} \\ \text{t = }\frac{\text{ω}_0\text{R}}{{\mu}_k.\text{g}\left(1+\frac{\text{R}^2}{\text{R}^2}\right)} = \frac{\text{ω}_0\text{R}}{2{\mu}_k.\text{g}}$$
Thus, it is clear that disc will start to roll earlier. The actual time at which disc starts rolling will be
$$\text{t} = \frac{ω_0\text{R}}{2{\mu}_k.\text{g}} = \frac{(10\pi)(0.1)}{3×(0.2)× 9.8} = 0.538.$$
7.32. Read each statement below carefully, and state, with reasons, if it is true or false;
(a) During rolling, the force of friction acts in the same direction as the direction of motion of the CM of the body.
(b) The instantaneous speed of the point of contact during rolling is zero.
(c) The instantaneous acceleration of the point of contact during rolling is zero.
(d) For perfect rolling motion, work done against friction is zero.
(e) A wheel moving down a perfectly frictionless inclined plane will undergo slipping (not rolling) motion.
Ans. (a) False. The direction of frictional force is opposite to the direction of motion of the centre of mass. In case of rolling object, the center of mass moves backwards so the frictional force acts in the forward direction.
(b) True. During rolling the point of the body in contact with the ground does not move ahead (this would be slipping) instead it only touches the ground for an instant and lifts off following a curve. Thus, only if the point of contact remains in touch with the ground and moves forward will the instantaneous speed not be equal to zero.
(c) False. For a rolling object instantaneous acceleration will have a value it is not zero.
(d) True. This is because during perfect rolling frictional force is zero so work done against it is zero.
(e) True. Rolling occurs only when there is a frictional force to provide the torque so in the absence of friction the wheel simply slips down the plane under the influence of its weight.
7.33. Separation of Motion of a system of particles into motion of the centre of mass and motion about the centre of mass :
(a) Show p = p′i+miV
where pi is the momentum of the ith particle (of mass mi) and p′i = miv′i. Note v′i is the velocity of the ith particle relative to the centre of mass. Also, prove using the definition of the centre of mass Σp′i = 0
(b) Show K = K′ + ½MV2
where K is the total kinetic energy of the system of particles, K′ is the total kinetic energy of the system when the particle velocities are taken with respect to the centre of mass and MV2/2 is the kinetic energy of the translation of the system as a whole (i.e. of the centre of mass motion of the system). The result has been used in Sec. 7.14.
(c) Show L = L′ + R × MV
where L′ = Σr′i × p′i is the angular momentum of the system about the centre of mass with velocities taken relative to the centre of mass. Remember r′i = ri – R; rest of the notation is the standard notation used in the chapter. Note L′ and MR × V can be said to be angular momenta, respectively, about and of the centre of mass of the system of particles.
$$\text{(d) Show} \frac{dL′}{dt} = \sum r′_i × \frac{dp′}{dt}\\ \text{Further, show that} \\ \frac{dL′}{dt} = τ′_{ext} $$ where τ′ext is the sum of all external torques acting on the system about the centre of mass. (Hint : Use the definition of centre of mass and third law of motion. Assume the internal forces between any two particles act along the line joining the particles.)
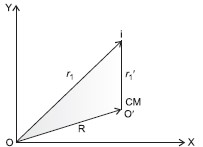
$$\textbf{Ans. }\text{Here }\overrightarrow{r}_i = \overrightarrow{r′}_i + \overrightarrow{\text{R}}+\text{R} \text{ and } \overrightarrow{\text{V}_i} = \overrightarrow{\text{V′}_i} + \overrightarrow{\text{V}} \\ \text{ where } \overrightarrow{\text{r′}}_i \text{ and } \overrightarrow{\text{v′}}_i \text{ denote the radius vector and velocity of the } i^{th} \text{ particle referred to centre of mass O′ as the new origin and } \overrightarrow{\text{V}} \text{ is the velocity of centre of mass relative to O.}$$
(a) Momentum of ith particle
$$ \overrightarrow{\text{P}} = m_i\overrightarrow{\text{V′}}_i\\ = m_i(\overrightarrow{\text{V′}}_i+\overrightarrow{\text{V}}) \space (\text{ since }\overrightarrow{\text{V}}_i = \overrightarrow{\text{V′}}_i +\overrightarrow{\text{V}}) \\ \text{or}\space \space \overrightarrow{\text{P}} =\overrightarrow{\text{m}}_i\overrightarrow{\text{V′}}_i+\overrightarrow{\text{m}}_i\overrightarrow{\text{V}}\\ \overrightarrow{\text{p}}= \overrightarrow{\text{p}_i} = \text{m}_i\overrightarrow{\text{V}}$$(b)
Kinetic energy of the system of particles.
$$\text{K} = \frac{1}{2} \sum \text{m}_i\text{V}_i^2 \\ = \frac{1}{2}\sum\text{m}_i\overrightarrow{\text{V}_i}.\overrightarrow{\text{V}_i} \\ = \frac{1}{2}\sum \overrightarrow{\text{m}_i}(\overrightarrow{\text{V′}_i}+\overrightarrow{\text{V}}).(\overrightarrow{\text{V′}_i}+\overrightarrow{\text{V}})\\ =\frac{1}{2} \sum \text{m}_i(\text{V′}_i^2+\text{V}^2+2\overrightarrow{\text{V′}_i}.\overrightarrow{\text{V}}) \\ = \frac{1}{2}\sum \text{m}_i\overrightarrow{\text{V′}_i}^2 + \frac{1}{2}\sum \text{m}_i\overrightarrow{\text{V}_i}^2 + \sum \text{m}_i\overrightarrow{\text{V′}_i}. \overrightarrow{\text{V}}\\ =\frac{1}{2}\text{MV}^2 + \text{K′} \\ \text{where } \text{M = } \sum \text{m}_i \text{ = total mass of the system}\\ \text{K′} = \frac{1}{2} \sum_{\substack{i}}\text{m}_i\text{V}_i^2$$
= kinetic energy of motion about the centre of mass
$$\text{or } \frac{1}{2}\text{Mv}^2 \text{= kinetic energy of motion of centre of mass product } \\ \text{since } \sum_{\substack{i}}\text{m}_i\overrightarrow{V′}_i.\overrightarrow{V} = \sum \text{m}_i \frac{d\overrightarrow{r_i}}{\text{dt}}.\overrightarrow{\text{V}} \\ = \frac{d}{dt}\left(\sum \text{m}_i\overrightarrow{r′}_i \right).\overrightarrow{V} \\= \frac{\text{d}}{\text{dt}}(\overrightarrow{\text{MR }}.\overrightarrow{ V}) \\ = 0$$ (c) Total angular momentum of the system of particles. $$\overrightarrow{\text{L}} = \overrightarrow{r}_i × \overrightarrow{p} \\ = (\overrightarrow{r}_i + \overrightarrow{\text{R}}) × \sum_{\substack{i}}\text{m}_i\overrightarrow{\text{V}}_i \\ = (\overrightarrow{r′}_i + \overrightarrow{\text{R}}) × \sum_{\substack{i}}\text{m}_i(\overrightarrow{\text{V}_i'}+\overrightarrow{V})\\ = \sum_{\substack{i}}(\overrightarrow{\text{R}}× \text{m}_i\overrightarrow{V}) +\sum_{\substack{i}} \text{r}_i' ×\text{m}_i\overrightarrow{V}_i' + \left(\sum_{\substack{i}}\text{m}_i\text{r}_i' \right)× \overrightarrow{\text{V}} + \overrightarrow{\text{R}} × \sum_{\substack{i}}\text{m}_i\overrightarrow{\text{V}_i} \\ = \sum_{\substack{i}}(\overrightarrow{\text{R}}× \text{m}_i\overrightarrow{V}) +\sum_{\substack{i}} \text{r}_i' ×\text{m}_i\overrightarrow{V}_i' + \left(\sum_{\substack{i}}\text{m}_i\text{r}_i' \right)× \overrightarrow{\text{V}} + \overrightarrow{\text{R}} × \frac{\text{d}}{\text{dt}}\left( \sum_{\substack{i}}\text{m}_i\overrightarrow{\text{r}_i'}\right)$$ The last two terms vanish for both contain the factor
$$\sum\text{m}_i\overrightarrow{r}_i' \text{ which is equal to} \\ \sum_{\substack{i}}\text{m}_i\overrightarrow{r}_i = \sum_{\substack{i}} \text{m}_i(\overrightarrow{\text{r}_i'} - \overrightarrow{\text{R}}) = \text{M}\overrightarrow{\text{R}} - \text{M}\overrightarrow{\text{R}}=0$$ from the definition of centre of mass. Also $$\sum_{\substack{i}}(\overrightarrow{\text{R}}×\text{m}_i\overrightarrow{\text{V}}) = \overrightarrow{\text{R}}× \text{M}\overrightarrow{\text{V}} \\ \text{so that } \overrightarrow{\text{L}} = \overrightarrow{\text{R}}×\text{M}\overrightarrow{\text{V}} + \sum_{\substack{i}}\overrightarrow{\text{r}_i'} × \overrightarrow{\text{P}_i} \\ \text{or } \overrightarrow{\text{L}} = \overrightarrow{\text{R }}×\text{M}\overrightarrow{\text{V}} + \overrightarrow{\text{L}'} \\ \text{where }\space \space \overrightarrow{\text{L}'} = \sum\overrightarrow{r}_i' × \overrightarrow{\text{P}_i}$$(d) From previous solution
$$ \text{where }\space \space \overrightarrow{\text{L}'} = \sum\overrightarrow{r}_i' × \overrightarrow{\text{P}_i} \\ \frac{d\overrightarrow{\text{L}'}}{\text{dt}} = \sum\overrightarrow{r}_i' ×\frac{d\overrightarrow{\text{P}_i}}{\text{dt}} + \sum\frac{d\overrightarrow{\text{r}_i'}}{\text{dt}} × \overrightarrow{\text{P}_i} \\ = \sum\overrightarrow{r}_i' ×\frac{d\overrightarrow{\text{P}_i}}{\text{dt}} \\ =\sum\overrightarrow{r}_i' × \text{F}_i^{ext} = \overrightarrow{\tau}_{\text{ext}}' \\ \text{Total torque } \\ \overrightarrow{\tau} = \sum \overrightarrow{r}_i × \overrightarrow{F}^{ext}_i \\ = \sum (\overrightarrow{r}_i × \overrightarrow{R})× \overrightarrow{F}^{ext}_i \\ = \sum \overrightarrow{r}_i × \overrightarrow{F}^{ext}_i + \overrightarrow{R} × \sum_{\substack{i}} \overrightarrow{\text{F}}^{ext}_i \\ = \overrightarrow{\tau}'_{ext} + \overrightarrow{\tau}_0^{(ext)} \\ \text{where} \overrightarrow{\tau}_{ext}'$$ is the total torque about the centre of mass as origin and s, that about the origin O.
$$\overrightarrow{\tau}_{ext}' = \sum \overrightarrow{r}_i' × \overrightarrow{F}_i^{ext} \\ = \sum \overrightarrow{r_i} × \frac{d\text{P}'}{dt}\\ = \frac{d}{dt}\sum_{\substack{i}}(\overrightarrow{r}_i × \overrightarrow{\text{P}_i}) = \frac{d \overrightarrow{L}'}{dt}$$
NCERT Solutions Class 11 physics
- Chapter 1 Physical World
- Chapter 2 Unit and Measurement
- Chapter 3 Motion in a straight line
- Chapter 4 Motion in a Plane
- Chapter 5 Laws of Motion
- Chapter 6 Work, Energy and Power
- Chapter 7 System of Particles and Rotational Motion
- Chapter 8 Gravitation
- Chapter 9 Mechanical Properties of Solids
- Chapter 10 Mechanical Properties of Fluids
- Chapter 11 Thermal Properties of Matter
- Chapter 12 Thermodynamics
- Chapter 13 Kinetic Theory
- Chapter 14 Oscillations
- Chapter 15 Waves
CBSE CLASS 11 NCERT SOLUTIONS
- NCERT Solutions Class 11 Physics
- NCERT Solutions Class 11 Chemistry
- NCERT Solutions Class 11 Biology
- NCERT Solutions Class 11 Maths
- NCERT Solutions Class 11 Accountancy
- NCERT Solutions Class 11 Business Studies
- NCERT Solutions Class 11 Economics
- NCERT Solutions Class 11 Geography
- NCERT Solutions Class 11 History
- NCERT Solutions Class 11 Political Science
- NCERT Solutions Class 11 English
CBSE CLASS 11 SYLLABUS
- CBSE Class 11 English Core Syllabus
- CBSE Class 11 Mathematics Syllabus
- CBSE Class 11 Physics Syllabus
- CBSE Class 11 Chemistry Syllabus
- CBSE Class 11 Biology Syllabus
- CBSE Class 11 Accountancy Syllabus
- CBSE Class 11 Business Studies Syllabus
- CBSE Class 11 Economics Syllabus
- CBSE Class 11 History Syllabus
- CBSE Class 11 Geography Syllabus
- CBSE Class 11 Sociology Syllabus
- CBSE Class 11 Political science Syllabus
- CBSE Class 11 Psychology Syllabus
- CBSE Class 11 Physical Education Syllabus
- CBSE Class 11 Applied Mathematics Syllabus
- CBSE Class 11 History of Indian Arts Syllabus
CBSE CLASS 11 Notes
- CBSE Class 11 Physics Notes
- CBSE Class 11 Chemistry Notes
- CBSE Class 11 Maths Notes
- CBSE Class 11 Biology Notes
- CBSE Class 11 Accountancy Notes
- CBSE Class 11 Business Studies Notes
- CBSE Class 11 Economics Notes
- CBSE Class 11 History Notes
- CBSE Class 11 Geography Notes
- CBSE Class 11 Political Science Notes
- CBSE Class 11 Entrepreneurship Notes
CBSE CLASS 11 BOOKS